自分の直進技術が、どの程度の方向および距離精度を出せるものかを知っておくことは意味のあることである。
今回以下のようなメニューにより、いろいろなスタイルでの精度確認を行うことができたので紹介する。
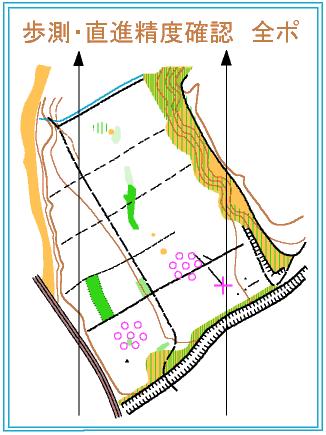
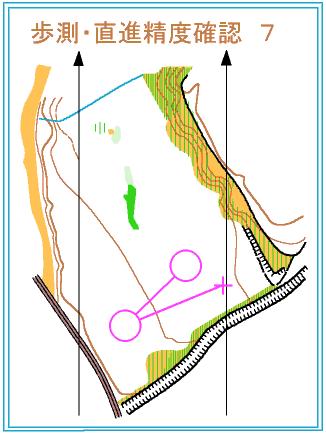
まず、「白糸の滝」の平坦部分の2ヶ所で、それぞれ7つの隣接コントロールを設置することを前提に、OCADで次のような地図を準備した。全ポで示す設置場所を任意に組み合わせたコース図である。組み合わせは49種類あるが、今回は被験者が10名程度だったので、その中で中央のコントロールを多く含む12種類を用意した。地図の右上にある数字が地図番号である。また、他の情報を利用しないように道を含む近隣の特徴物を削除し、スタートはその場所を点にするために△ではなく+印を使用した。
隣接コントロールはちょうど20m間隔で並べてあり、直進距離は150〜200mである。この全ポのレイアウトはもちろん事前には知らさないでおく。被験者に任意の地図を取り直進するように言う。この時途中でフラッグが見えても、正しく歩測が終了するところまで進んでから、一番近いコントロールに歩み寄るように指示しておく。各コントロールには次のような説明表をぶら下げてある。
| 444 | 555 | |||
| 目標に対して | 目標に対して | |||
| 以下のように | 以下のように | |||
| ずれています | ずれています | |||
| 地図No | ずれ | 地図No | ずれ | |
| 1 | 当り | 1 | 右右 | |
| 2 | 当り | 2 | 右右 | |
| 3 | 左 | 3 | 当り | |
| 4 | 左奥 | 4 | 右奥 | |
| 5 | 当り | 5 | 右右 | |
| 6 | 右 | 6 | 右右 | |
| 7 | 左 | 7 | 当り | |
| 8 | 右前 | 8 | 右右前 | |
| 9 | 当り | 9 | 右右 | |
| 10 | 右 | 10 | 右右 | |
| 11 | 右奥 | 11 | 右右奥 | |
| 12 | 左前 | 12 | 右前 |
例えば、地図番号7の地図を持った人がコントロール番号444にたどり着いた場合は、その人は地図番号7のところの説明「左」にずれたことになる。そして右の方へ移動して555に着けば、地図番号7は「当り」となっていてそこが正しい場所だったことが分かる。
実際には20m間隔なので隣のフラッグは首を回すと見える位置にある。これをもう一度行ってスタートに戻る。そこには別の地図があるので何度か繰り返すことが出来る。丁寧さやスピードを変えた時のバラツキを見たり、途中の障害物の避け方の工夫など、様々な試行錯誤が可能である。
<考察>
・150〜200mで20m間隔はかなり難しい。この場合の許容誤差は10mで、5〜6%になるのに気が付かなかった(10〜13%ではない)。たぶん7〜8%が妥当であろう。
・今回のような平坦な部分でも、実際の林の中でやることの効果は大きい。不整地であること、ちょっとした小枝や倒木があることも実践的で良い。実際にそういう障害物をいつも右に避ける癖があってずれる人がいることも分かった。
・設置はなかなか困難である。覚悟して準備する必要がある。(パーマネントコースが欲しい)
・わずかだが緩斜面を往復させることで上り下りの違いも確認できたし、地図がすぐに再利用できるので短時間に何度も試せて具合が良かった。ウォーミングアップ用メニューとして最適である。
以上